Finally have the full confidence that this version will be working well. As I am using the previous design as RnD and finalized the ESC is working and also corrected a few mistakes that I had done on the previous version. This coming version will be having:
– 4-in-1 ESC with 5A on each channel (Good enough for a small 3-inch quads)
– DSHOT600 is supported
– BLHeli_S or BlueJay firmware are supported
– STM32F405RTG6 as the heart of the Flight Controller
– With a few serial ports for GPS
– OnBoard OSD
– SBUS protocol
– Baro onboard
– MPU6000 Gyro
– Current Sensor
– 3.3V buckbooster for all the ESCs, STM32 and etc
– 5V buckbooster for VTX, Cam and GPS
– Theoretically should be able to run from 2.0v ~ 4.2v. Yes, only 1S battery
– 32.5 x 32.5mm
Why I build these?
The reason building this is to understand how the whole quad system works. This let me dive deep into every aspect. I learned about ESC, ESC firmwares and also understanding how the ESC MOSFET works. The interesting part of this FC is low power. Normally FC using the cheaper version of the buck converter. I am trying to use a decent powerful buckbooster converter and hopefully this will let me to fly my quad for more than 20 minutes on single cell. All these ideas came from DaveC FPV which he had built a very nice Nano Long Range Quad running on 1S. This is the video -> https://www.youtube.com/watch?v=LDJBj7hRqW0. I would like to buy those FC but I just want to have something that I am able to build and opensource the schematic to everyone and build one for yourself. Once I am done, I will start to share out the schematic. Just need to make sure is working before sharing out.
Also, with this will let me keep on building more and more quads.
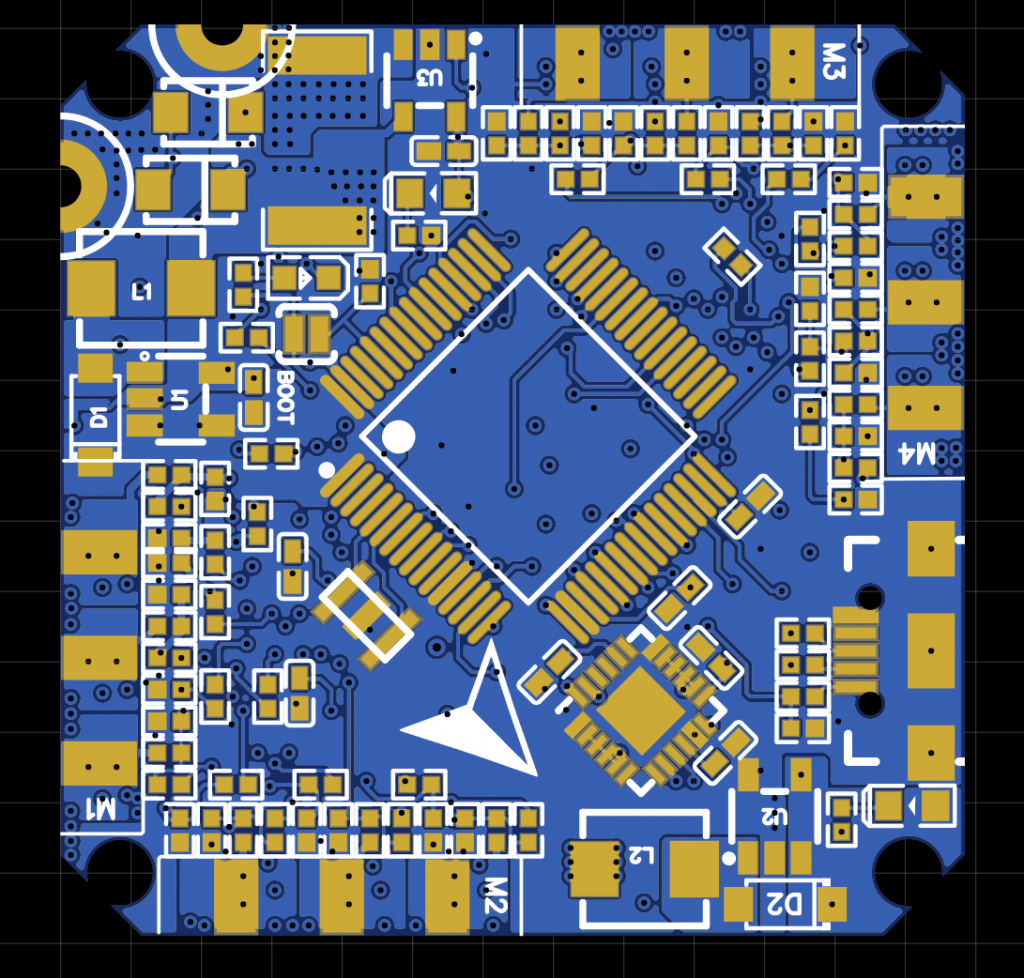
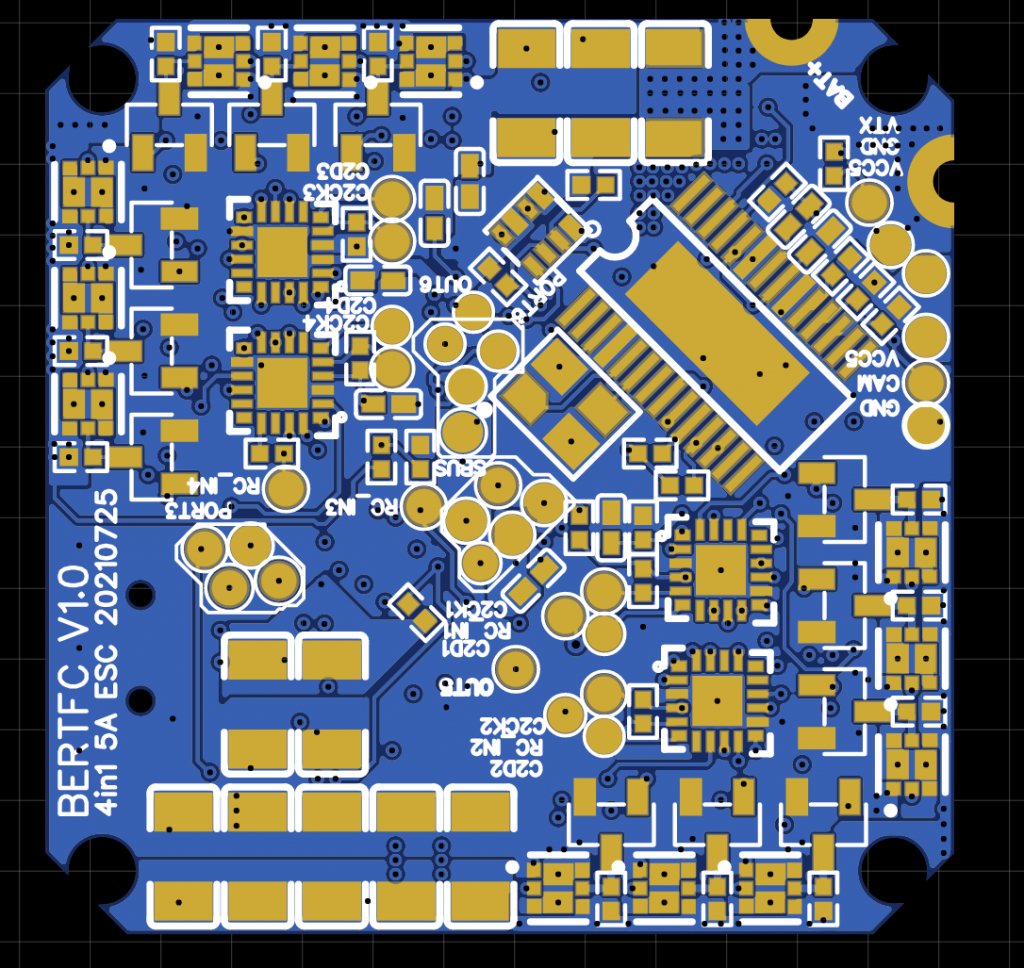
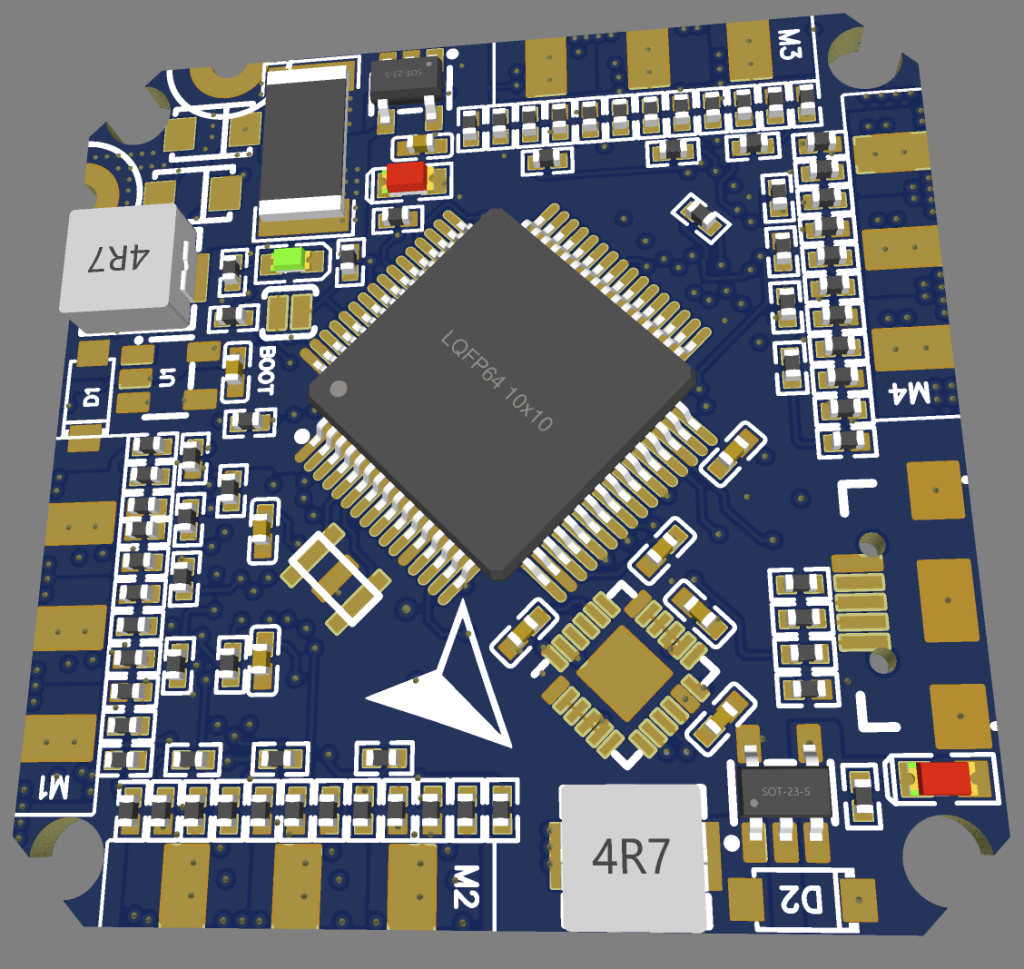
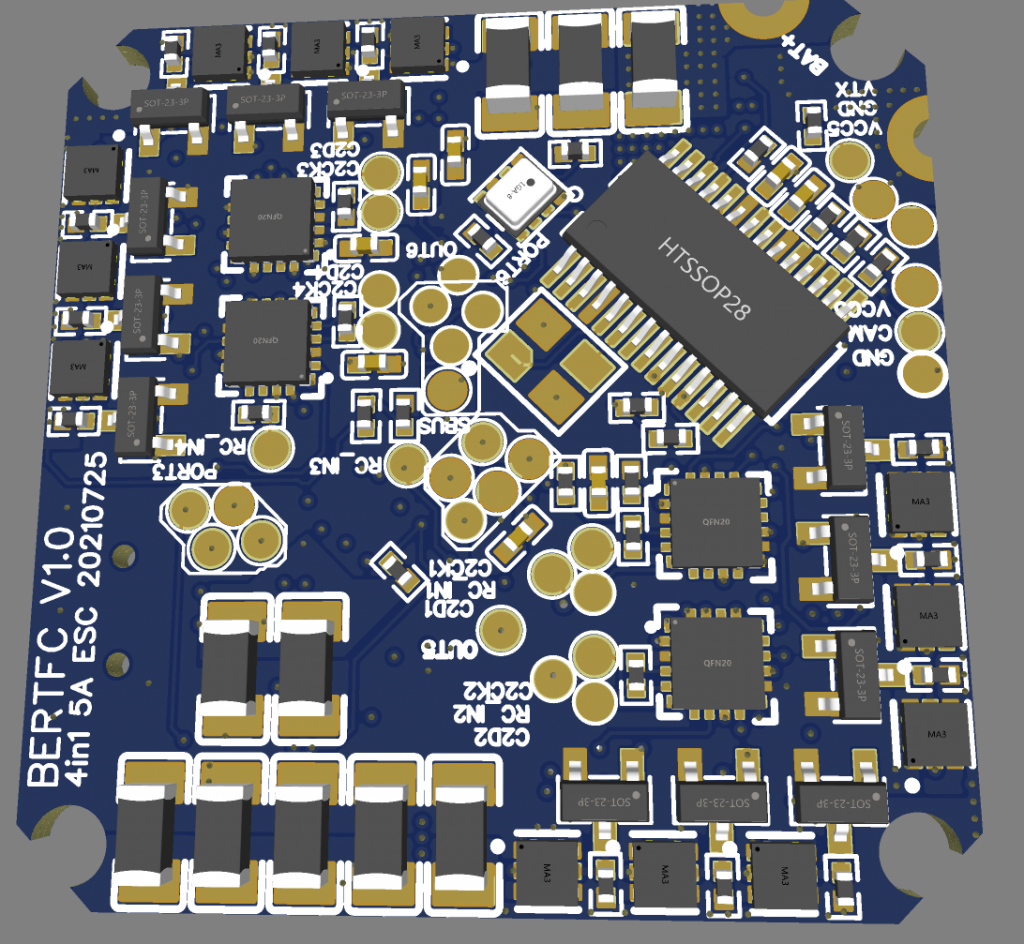
Below are the images of the board. Yeah, I just sent for fabrication and dont have the real thing yet. So stay tune, I will build and update again over here.