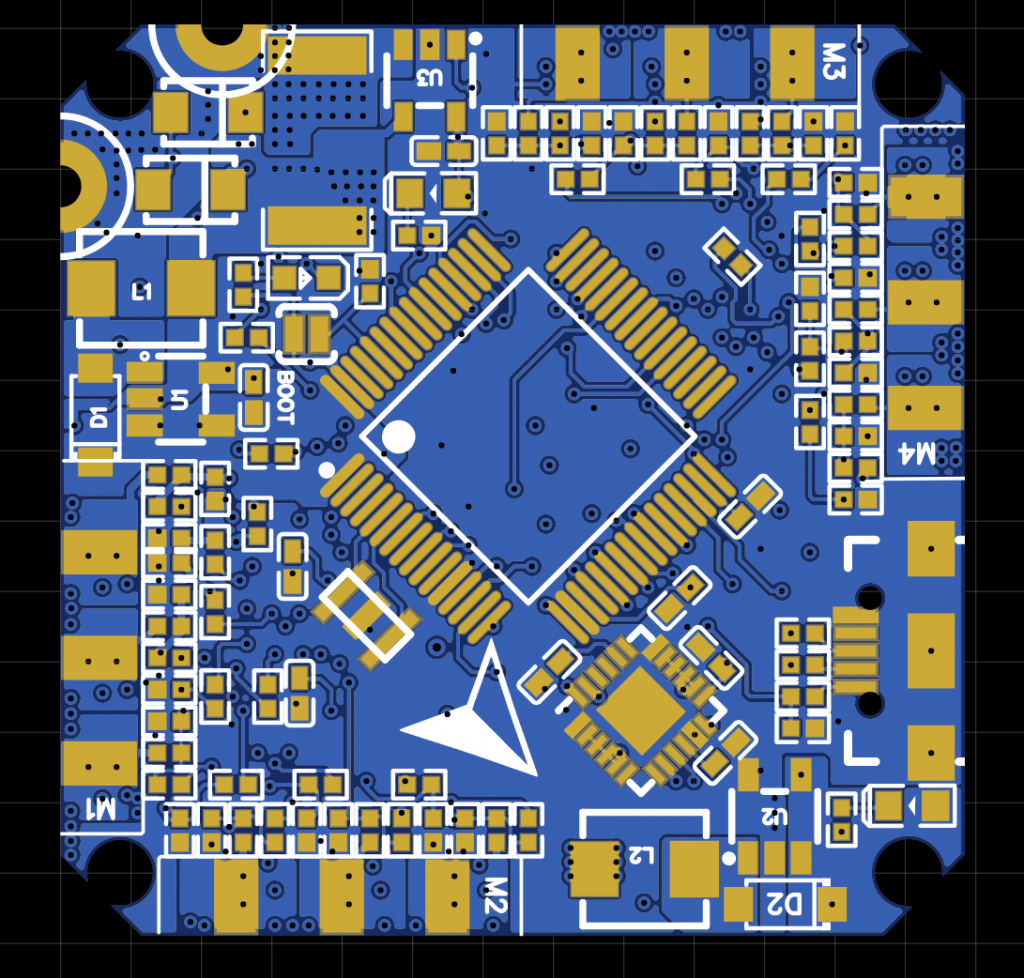
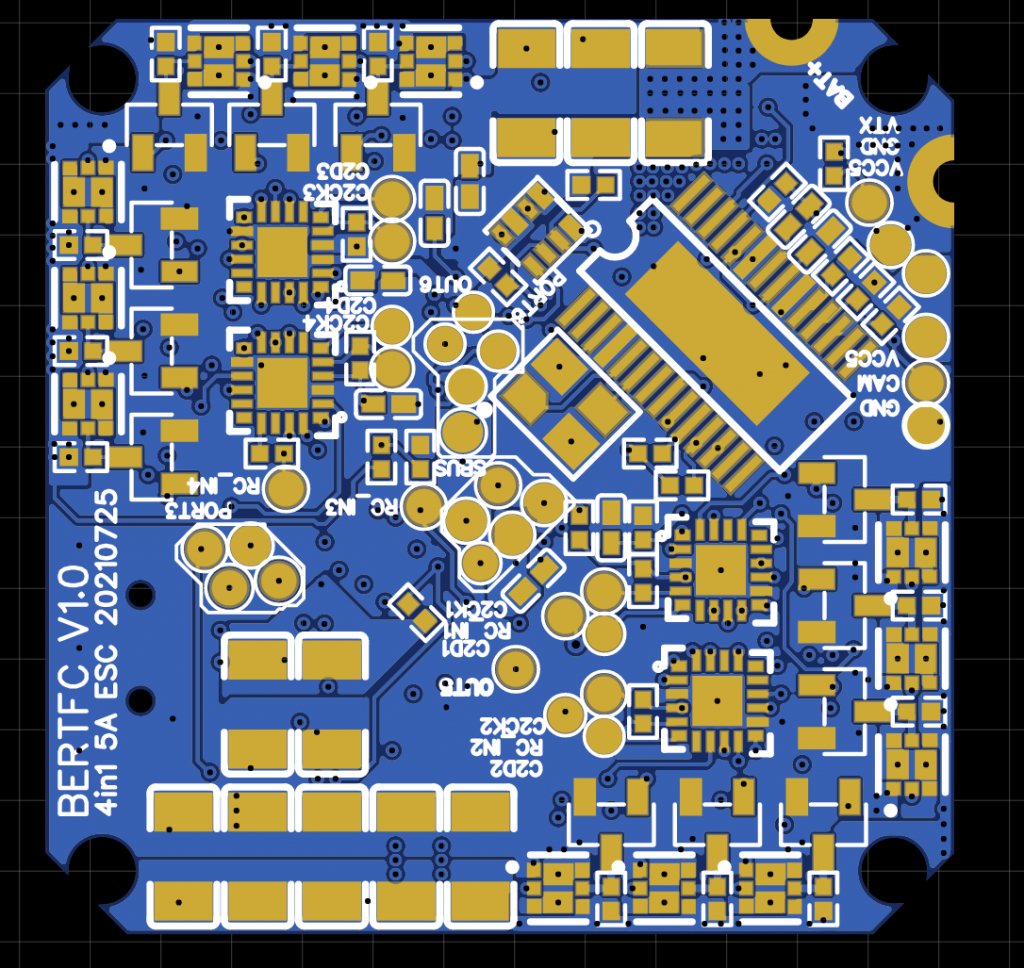
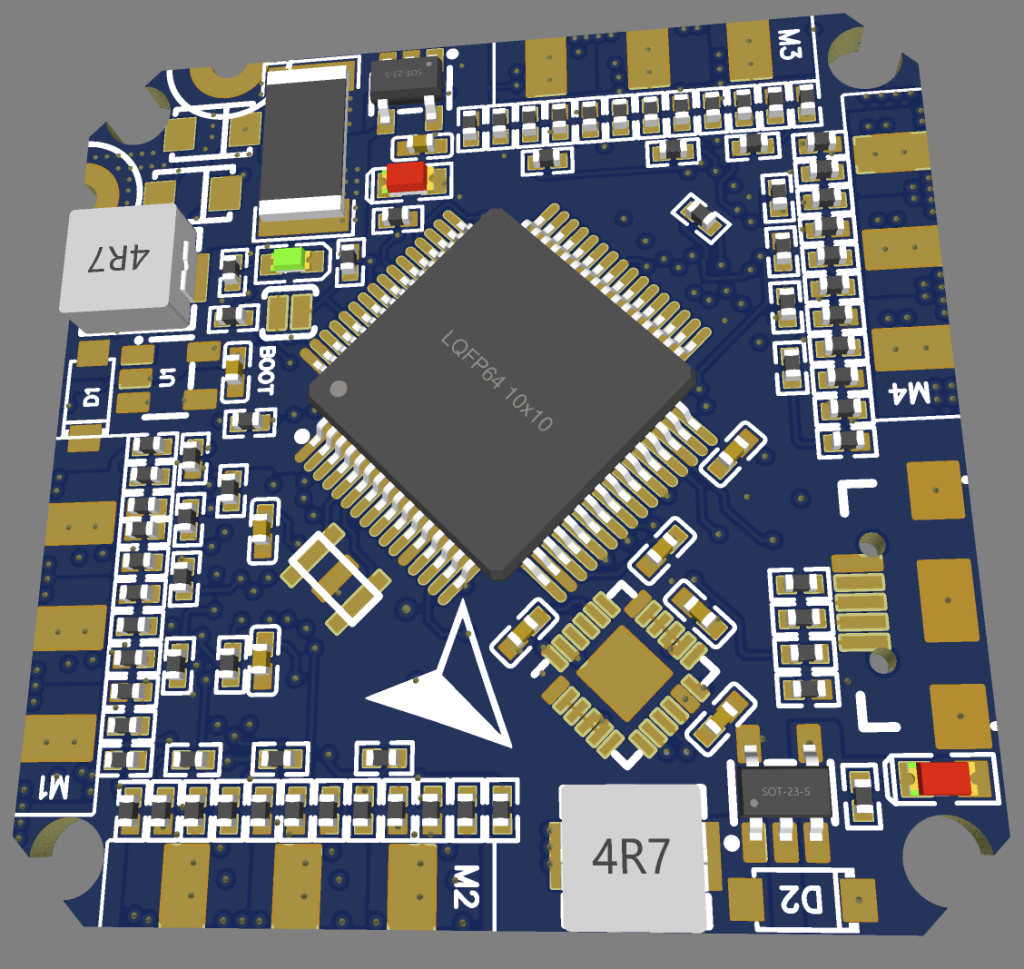
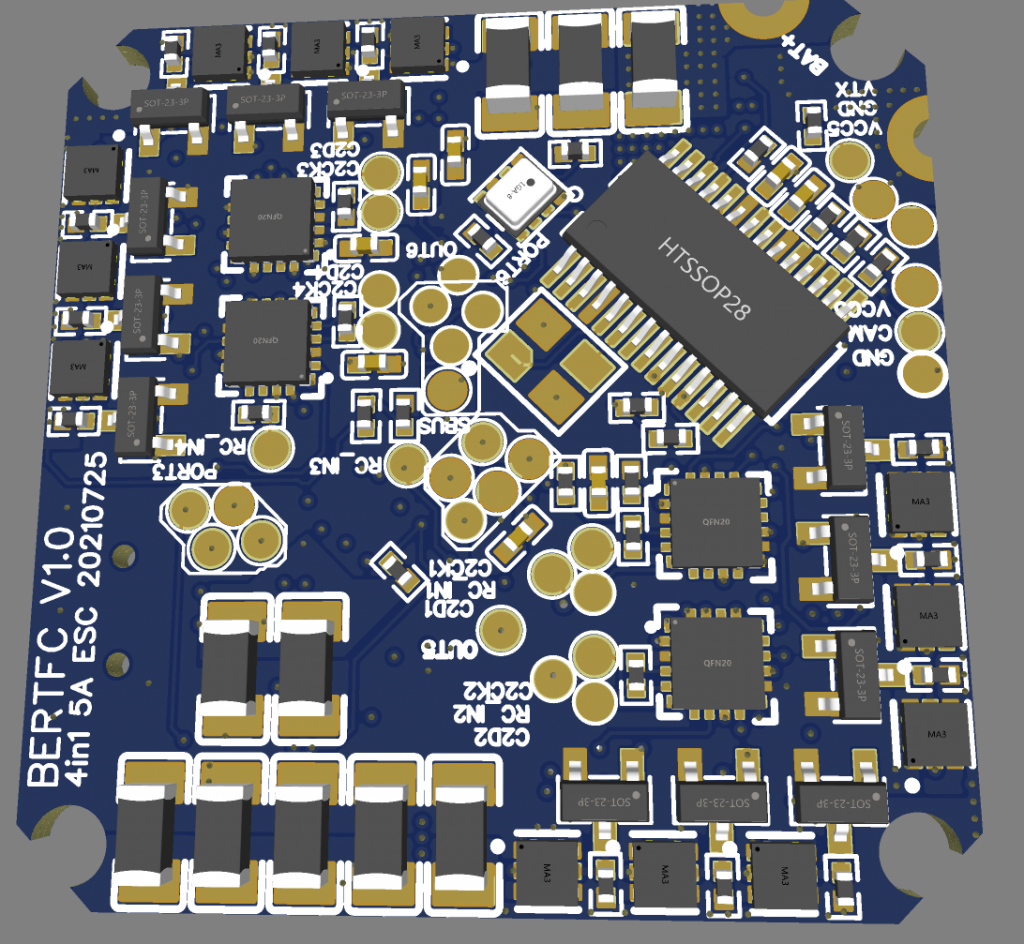
Finally have the full confidence that this version will be working well. As I am using the previous design as RnD and finalized the ESC is working and also corrected a few mistakes that I had done on the previous version. This coming version will be having: – 4-in-1 ESC with 5A on each channel (Good enough for a small 3-inch quads) – DSHOT600 is supported – BLHeli_S or BlueJay firmware are supported – STM32F405RTG6 as the heart of the Flight Controller – With a few serial ports for GPS – OnBoard OSD – SBUS protocol – Baro onboard – MPU6000 Gyro – Current Sensor – 3.3V buckbooster for all the ESCs, STM32 and etc – 5V buckbooster for VTX, Cam and GPS – Theoretically should be able to run from 2.0v ~ 4.2v. Yes, only 1S battery – 32.5 x 32.5mm
Why I build these? The reason building this is to understand how the whole quad system works. This let me dive deep into every aspect. I learned about ESC, ESC firmwares and also understanding how the ESC MOSFET works. The interesting part of this FC is low power. Normally FC using the cheaper version of the buck converter. I am trying to use a decent powerful buckbooster converter and hopefully this will let me to fly my quad for more than 20 minutes on single cell. All these ideas came from DaveC FPV which he had built a very nice Nano Long Range Quad running on 1S. This is the video -> https://www.youtube.com/watch?v=LDJBj7hRqW0. I would like to buy those FC but I just want to have something that I am able to build and opensource the schematic to everyone and build one for yourself. Once I am done, I will start to share out the schematic. Just need to make sure is working before sharing out.
Also, with this will let me keep on building more and more quads.
Below are the images of the board. Yeah, I just sent for fabrication and dont have the real thing yet. So stay tune, I will build and update again over here.
Since day one I am on this RC hobby, I never had any aftermarket Radio Controller Transmitter. I had bought a broken Futaba Radio Controller and stripped off all the components inside the case and just left only the toggle switches and the gimbals. I linked them to my arduino nano for the first version that I have. I was using a very long antenna to maximize the 2.4G range.
Version 1.0 – Running on Arduino, without removing the original display and with a long antenna.
Later on, found that need a display to monitor the status and all the readings and decided to strip away the display and become a fully own custom version with display. Of course the case still a normal RC Transmitter case.
Version 1.1 – Upgraded with Buzzer and Display (OLED)
Had been using this a while and keep trying to learn flying at that time. Didn’t noticed about the precision I need that time. This Futaba gimbals are analog and the readings are about +-10% accuracy. Well, I was flying stable mode at that time and was enough for me.
This is the 1st quad I had build and flew with the barebone arduino with breadboard on it. Everything is hard wired. Wrongly match ESC with Motors. Kept burning ESC halfway in the middle of flying the quad until one day finally got it right. Big quads must use LOW KV, small quads must use HIGH KV. This will be another topic of it.
So once I am getting used to what I need, I had built a few racing quads with my own custom receiver and custom RC Transmitter. Until I had reached my limits and found out that actually I need something that are more precise in gimbal readings and faster processing microcontroller. I had upgrade from ATMEGA328 to STM32F1 chipset. But this also not for pretty long because I cant get what I need and the flexibility I wanted. Within the same year, I had upgrade to another version where the Radio Control Transmitter is totally 3D printed with FrSky M10 Gimbal Hall Effect sensor, ESP32, EByte E01-2G4M27D (Replica of nRF24L01) with 5km range and custom charging and 4 toggle switches. It was a development stage and the look of it like frankenstein because everything is opened.
The Frankenstein version.
It comes with dual OLED, for the fun of it and is running on ESP32 with BLE, WiFi and lots of computation power. I love this so much. The problem of this was a bit clunky and a bit opened. Very vulnerable from water that splashed in if is raining and so on. Well, I finally ditched off everything migrated to a better version and better designed of the Radio Controller Transmitter.
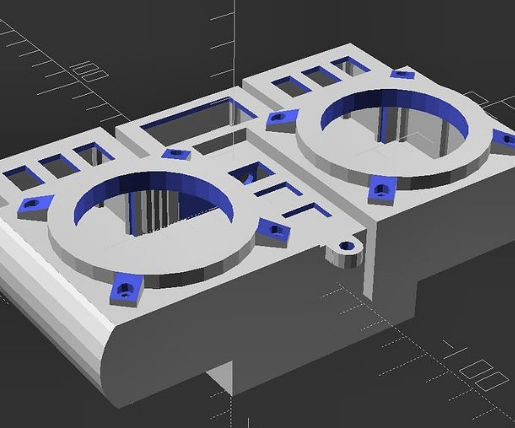
I designed this from scratch using OpenSCAD.
And the out come……
This is the latest version I have for now
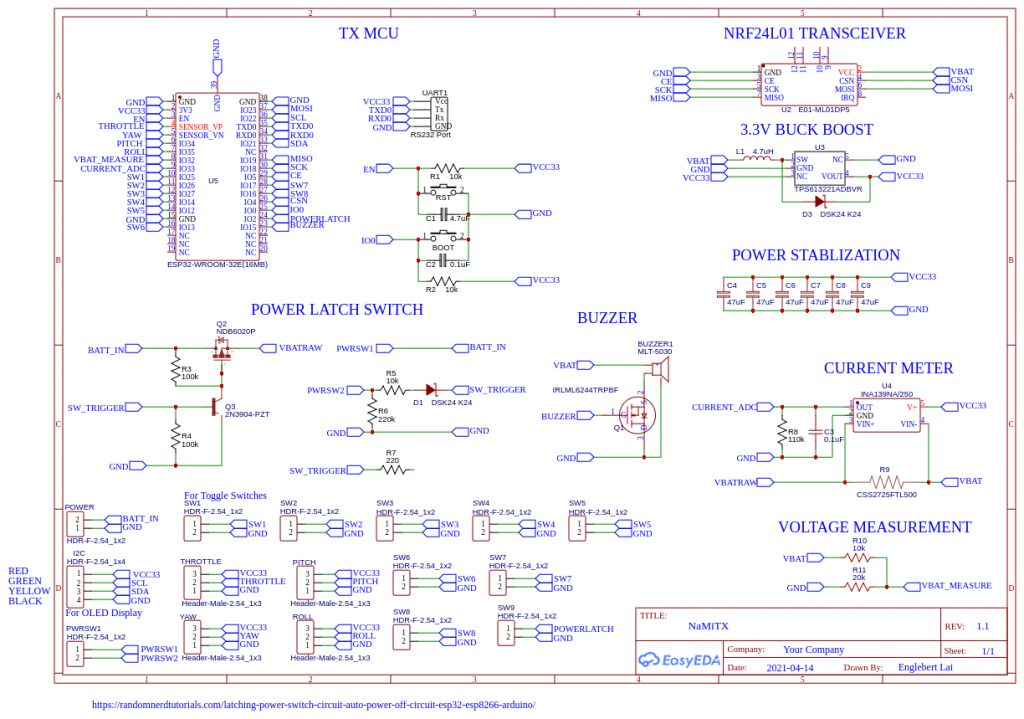
Yeah, A little bit difference but almost there. I used: – 9 Push switches 10x15mm – ESP32 16MB – 2 x FrSky M10 Gimbal Hall Effect Sensor – 1 x 0.96″ OLED – 30AWG silicon wires – 1 x 18650 Battery Holder – Custom design PCB and fabricated by JLCPCB – 1 x EByte E01-2G4M27D – Lots of SMD components (Look at the schematic)
I had perfected the menu display without using any buttons but using the gimbal to scroll through the items. Trying to save some I/O pins for the switches so I am having more channels to play with. I used to have a charger module built in with this but for this version I had removed it for the simplicity. Just charge the 18650 cell with a proper charger module and swap another piece if is low power.
WARNING: Still in progress of development. The current meter is not usable for this as the current draw was less than 1A. The designed was for quads that is draining > 1A. I will need to fix that and also the buzzer driver, I had put the MOSFET wrongly. I will need to change that in future. For now I had temporary disabled the buzzer. As well as the power latch section, I cant wait for the components arrival. I had altered to an ordinary power regulator module which stabilized the voltage from 4.2v -> 3.3v. The minimum operating voltage is about 3.5v as I had measured.
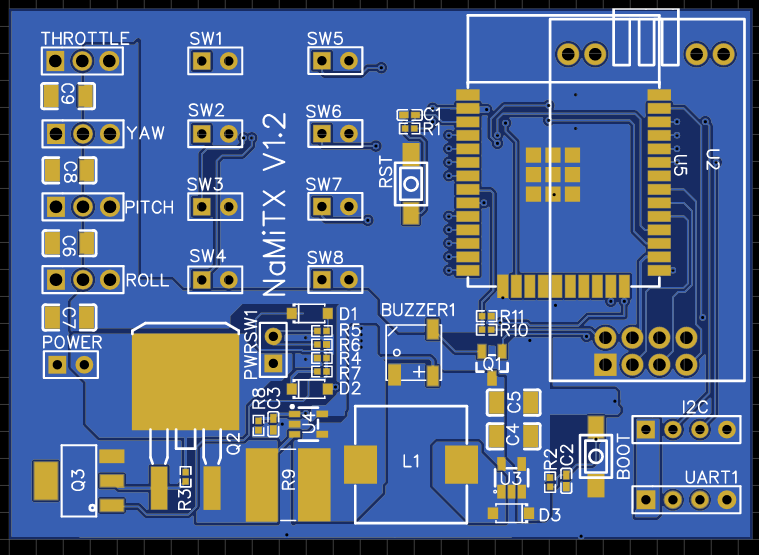
The PCB Layout
I will share the gerber later once I had perfected the issues.
Initial plan was thinking to have it run under 2.5v but the chip havent arrive until now. No worries, I am going to build some more with a better design soon.
Next topic will be the receiver and the details. I will write up and post it here as well as the code. The receiver is running on SBUS signal. Stay tune….